 Terabot机械臂是一款优秀的6自由度全电动控制可执行多任务的遥操作机械臂。该臂由一个5自由度的机械臂加上1个自由度的夹持器构成,同时在手臂前端配备有监控摄像头。该机械臂具有优秀的载荷自重比使其成为移动机器人应用中完美选择,如军事、排爆、侦查、矿井、核生化采样、科研等。
Terabot机械臂是一款优秀的6自由度全电动控制可执行多任务的遥操作机械臂。该臂由一个5自由度的机械臂加上1个自由度的夹持器构成,同时在手臂前端配备有监控摄像头。该机械臂具有优秀的载荷自重比使其成为移动机器人应用中完美选择,如军事、排爆、侦查、矿井、核生化采样、科研等。
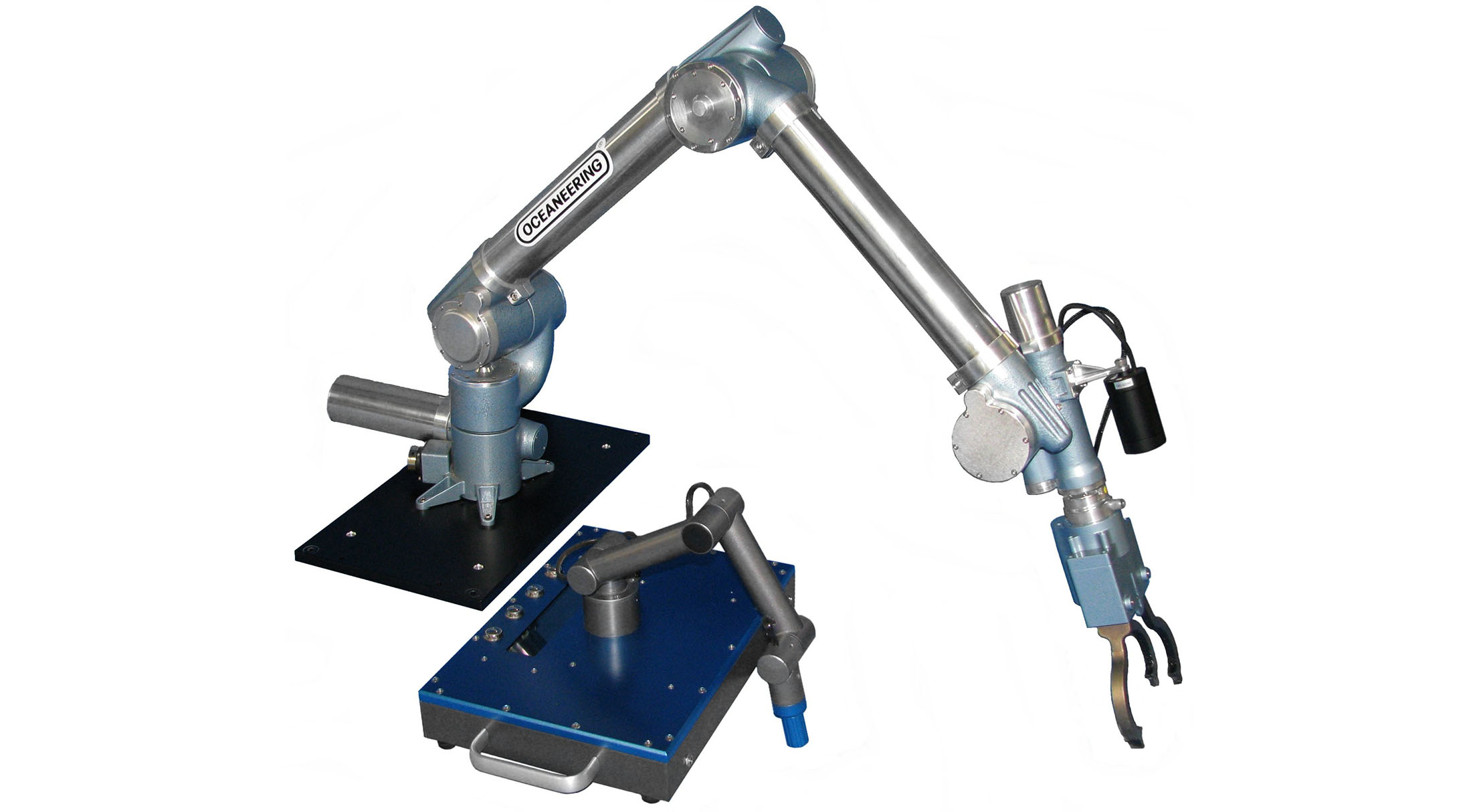
Terabot遥操作机械臂机械臂是完全独立的,可以安装到任何无人地面车辆(UGV)上,也可以单独使用。
Terabot 提供了两种控制选项:采用空间通信(SC)遥操作控制器模式或采用机械臂末端自主运动的控制程序模式。
Terabot 的空间通信(SC)遥操作控制器提供了与机械臂关节点对应的控制结构,用户只需操控控制器的操纵杆,机械臂便可顺应运动。这种控制方式比传统的手柄的控制方式更为直观和灵活。
Terabot也提供了机械臂末端自主运动的控制程序模式,用户可以通过程序完成机械臂的自主运动。
Terabot 机械臂关节全密封性、低反冲,离合器保护性设计保证机械臂在过载或者碰撞的情况下不被损坏。防护等级IP65(可升级至IP67)保证机械臂在恶劣环境下可以很好胜任各种任务。
Terabot快速手动安装面板保证了机械臂安装非常简单、快速。机械臂的末端也可使用不同的执行工具,包括卡爪,工具剪,工具钳等。
特点:
|
优点:
|

应用:
- 军事/排爆
- 快速反应/反恐
- 矿井救援探测
- 生物技术/生化反应及清理
- 教育/研究
- 化学,生物,放射性和核( CBRN )采样
|
|
|

