地面无人车实验室方案:
所谓地面无人车,即具备自主驾驶能力,能够自主避开障碍物、规划行驶路径、识别道路标识并做出相应的反应,对环境具有判断和感知能力的移动机器人。
该平台具备室内、室外定位导航能力,基于开源的ROS系统开发,提供丰富传感器接口和API选项,便于后期进行二次开发和集成。
核心硬件构成:地面移动平台、激光雷达、工业相机、差分GPS、IMU等。
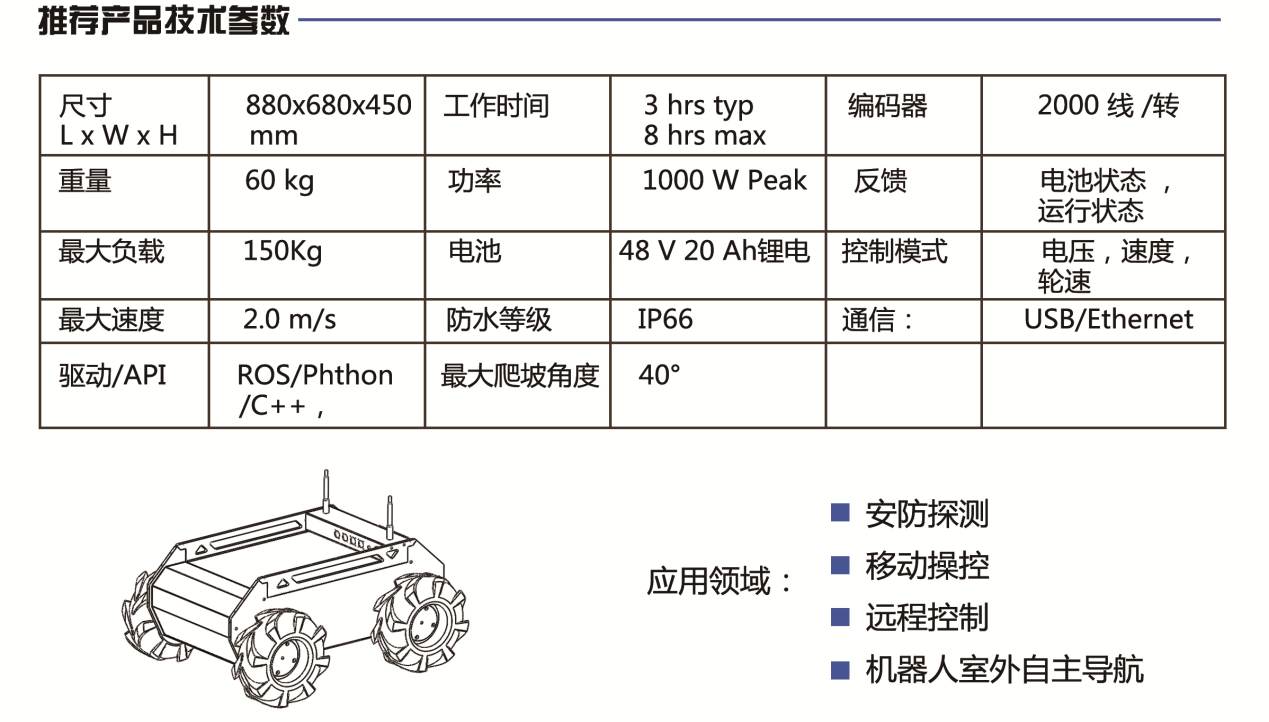
移动平台选取我公司自主研发的Bulldog,该移动平台采用四轮差速驱动系统,全车采取防水防尘处理,适合全地形运动的轮胎及较高的底盘高度适应各种路面,既满足崎岖地形路面,又可满足室内的运行环境。同时内置Intel高速处理器,能够满足对图像数据、点云数据等数据的分析处理的速度要求,保证该无人车的正常运行。车内安装有编码器,实时反馈轮速信息,实现对车速的闭环控制,内置IMU能够对小车运动方向进行实时控制及反馈,以保证行驶过程中维持姿态,防止倾倒。
激光雷达具有探测距离远,一般能到100米左右,而且能够准确获取物体的三维信息,同时稳定性相当高,鲁棒性好。在无人车系统中主要用于完成1.路沿检测,也包括车道线检测;2.障碍物识别,主要是对动态物体的识别;3.定位以及地图的创建。

工作原理:
1.路沿或车道线检测
激光雷达通过发出激光束360度扫描来获取周围环境的点云数据,提取点云数据中的特征点进行检测并获得路沿点,进而直线拟合提取到的有效点,最终将路沿或是车道线检测出来。

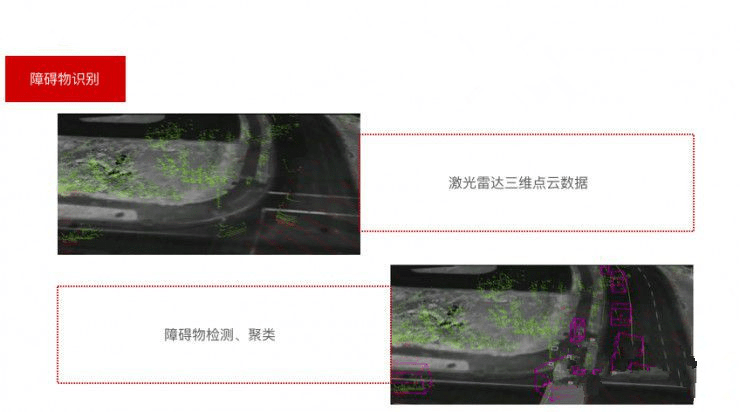
- 障碍物识别
当激光雷达获取点云数据后,我们对障碍物进行一个聚类,提取物体三维信息后,把这个物体放到训练集里,用SVM分类器把物体标识出来。而训练集是需要我们提前对不同物体做人工标识的,把不同物体的反射强度、横向和纵向的宽度以及位置姿态作为特征信息,提取做出数据集并用于训练。最终的车辆、行人、自行车等运动物体的识别是由SVM分类器来完成。

3.定位及地图绘制
定位理论有两种:基于已知地图的定位方法以及基于未知地图的定位方法。现今普遍采用第一种定位方式,即事先获取无人车的工作环境地图(高精度地图),然后根据高精度地图结合激光雷达及其它传感器通过无人驾驶定位算法获得准确的位置估计。而基于未知地图的定位方式就是通过SLAM技术来实现,通过对激光雷达的点云数据进行处理,提取一个平面的数据信息来生成二维地图,借助SLAM算法来实现实时定位导航并规划路径。
工业相机在无人车系统中主要是实现对静态障碍物以及道路标识的识别,因为相机可以很容易通过深度学习把障碍物进行细致分类,这有助于提高识别精度,在训练集的制作方面较激光雷达有着明显的优势,同时也具备更远的探测距离。
差分GPS系统分为基准站和移动站两部分。基准站放在固定的位置,并实时以5Hz的原始数据向移动站发送差分改正信号;移动站接收载波相位差分信号的同时输出精确的定位信息及航向、姿态数据信息。采用双天线的惯性组合导航系统可以提供静态的初始化,并在有楼有树的城市主干道及过街天桥环境下能提供持续稳定的位置、航向、速度等信息。
差分数据链路如下:


惯导系统是通过安装在运动载体上的陀螺仪和加速度计来测定运动载体位置的一个系统。通过陀螺仪和加速度计的测量数据,可以确定运载体在惯性参考坐标系中的运动,同时也能够计算出运载体在惯性参考坐标系中的位置。该系统是完全自主的,它既不向外部发射信号,也不从外部接收信号,其系统精度主要由地球的参数精度决定,具有抗环境干扰能力强、短期精度高、稳定性好等优点。在该无人车系统中,我们选用高精度的IMU惯导测量单元来获取所需要的参数,满足相关研究需要。
IMU是用于测量物体三轴姿态角(或角速率)以及加速度的装置。
一般情况下,一个IMU内会装有三轴的陀螺仪和三个方向的加速度计,来测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。为了提高可靠性,还可以为每个轴配备更多的传感器。一般而言IMU要安装在被测物体的重心上。

1.陀螺仪:
用高速回转体的动量矩敏感壳体相对惯性空间绕正交于自转轴的一个或二个轴的角运动检测装置,用于检测物体角速度变化情况。在IMU中陀螺仪提供了一个参考坐标系,同时也用陀螺仪来稳定安装有加速度计的平台。
2.加速度计
用于测量物体线加速度的仪器,是重要的动态特性校正元件。加速度计在本质就是一个一自由度的振荡系统,须采用阻尼器来改善系统的动态品质。


该无人车系统具备较高性价比,同时提供相关ROS功能包,已能实现智能驾驶的功能,提供的丰富接口方便后期调试和二次开发,基于开源的系统开发利于算法的移植验证和优化修改,最终提高课题研究的效率和方便展开相关深入的研究。
多车群控
多机器人系统相较于单一的机器人具有更好的空间分布、功能分布、时间分布、信息分布、资源分布等特性,系统中各机器人可以实现多种信息共享,使整个系统具有更好的数据冗余性和鲁棒性,通过互相协作的方式完成任务,使得系统具有并行性、容错性、灵活性、高效性等优势。从而满足在需要处理复杂的、高效率的、并行完成的任务时,能够胜任。
多车群控系统作为研究多机器人系统的一个方向,在现今的仓储物流领域、军事领域等都有了实际应用,以具备自主驾驶的无人车作为主体,来实现协调路径规划避免碰撞或是协同完成指定任务以提高工作效率和成功率。该系统控制结构多采用分布式结构,以多智能体的模型进行建模,每个移动机器人都是一个自治或是半自治系统,移动机器人之间以及移动机器人和环境之间都采用并行工作原理,需要进行通信交互。
通讯方式介绍:
- 11技术
基于无线局域网(WLAN)的IEEE802.11标准规定的媒体访问控制层(MAC)的协议标准,在MAC层使用相关协议和方法来实现多机器人系统内部的无线通讯,该技术具有带宽高、抗干扰性强、组网方便等优点,能实现高速数据信息传输,有效传输距离达到100m,该技术也是目前室内无线通信普遍采用的方式。
- 蓝牙技术
该技术是一种低成本、短距离、可互操作的鲁棒性无线技术,工作频段在2.4GHz。其具有开放的接口标准、抗干扰能力和纠错性能好、可建立临时性对等网等特点,具有较好的通用性和实时性。
- 射频技术
采用具有远距离传输能力的高频电磁波,能够满足室内室外的无线通讯。通过将电信息源(模拟或数字)用高频电流进行调制,形成射频信号,经天线发射到空中,远距离接收后进行反调制,还原成电信息源,完成信息的无线传输。频率范围从300KHz~30GHz之间,无线芯片大多集成全部RF和基带处理,方便自主设计调试,同时有较多的选择。
以3台无人车为主体,搭载无线数据通讯模块,同时搭建上位机控制平台,通过上位机实时接收来自无人车的位置、速度信息并记录数据,上位机提供无人车初始点和目标点的信息,以让小车明白自身位置,并自主构建地图规划路径完成任务。
实验室建设目的:
- 多机器人协作路径规划的研究
多机器人协作路径规划的算法很多,按机器人协作的性质大致可分为:基于显式协作的多机器人路径规划和基于隐式协作的多机器人路径规划。显示协作主要侧重于通讯和协商机制的研究,隐式协作主要有人工势场法、模糊控制方法等路径规划方法,只要遇到障碍物就会执行预先设定的应激性避障策略。基于该平台开展相关算法的验证研究和优化,具有效率高、可扩展性好等优点。
- 多移动机器人的分布式合作系统的研究
智能交通
实验室建设方案:
1.模拟城市交通道路,搭建真实沙盘
该沙盘模拟了真实的城市道路环境,包含城市道路中基本的标识标线、绿化带、交叉口、交通信号灯等交通基础道路和设施。通过上位机控制平台系统,对沙盘中特定区域进行例如湿滑路面区域、施工区域、隧道涵洞区域、学校等场景设定,以满足模拟环境下的各方面需求。
2.车路协同系统构建
什么是车路协同系统?即所有车辆、道路信息都将被纳入到实时交互的网络中,任何一辆车都可感知到周遭的汽车、道路信息,并提前做出合理的驾驶规划;同时,上位机也会根据数据处理结果,给车辆、信号灯等提供建议,使道路运行安全畅通,提高道路运行效率。
可实现功能:
- 前方发生交通事故,为避免造成交通拥堵,该系统会提前对后续的车辆做出预警,以控制车速和行车路径的方式保证后续车辆的顺利通行
- 遇超车、变更车道、紧急制动等情况时,该系统会提前预警,并对整个道路中可能会受此影响的车辆做出行驶路径、速度的变化,保证道路高效和安全
- 基于该系统,可以判断出哪条道路的车流量较大,智能调节交通信号灯的时间,从而有效缓解交通高峰压力
- 计算优化行车路径,将车流分流,同样可以缓解交通压力,避免事故发生
- 智能判断如救护车、消防车等车辆,实现它们的优先通行
- 对于视野被建筑物遮挡的路口来说,可以提前告知横向车道的情况,做出预判,避免交通事故
- 危险道路预警,遇施工道路或结冰道路,可标记出该路段为后来车辆预警
实验室建设目的:
基于该实验室提供的研究平台,便于展开如下的课题研究:
- 单一无人车的路径优化问题
- 多车协同的系统控制问题
- 车路协同系统下,智能交通的相关问题(关于如何提高道路使用效率和避免道路交通事故等)