服务机器人是一种半自主或全自主工作的机器人,它能完成有益于人类的服务工作,但不包括从事生产的设备,服务机器人的定位就是服务。在不远的将来,各种服务机器人将走进人们的日常生活,在商场、宾馆、医院、家庭、社区发挥不可或缺的作用。相对于工业机器人,服务机器人一般所处的环境各种各样,处理的信息更为复杂,实时性的要求较高,有必要针对此类机器人展开深入研究。
服务机器人是在非结构环境下为人类提供必要服务的多种高技术集成的智能化装备,服务机器人按照工作场景目前大致可分为两类:
结合目前世界范围的机器人发展数据和我国的实际国情,我国的服务机器人市场巨大,目前亟待发掘。最近几年国家也出台相关的政策鼓励各科研机构开展服务机器人的研究。

目前我司提供多种用于服务机器人研究的科研平台,如turtlebot机器人研究平台、协作机械臂、履带式移动平台等。本章主要讲述家用类服务机器人平台,专业类的服务机器人参照前几章所述。就目前常用的服务机器人研究平台的组成框图如图所示

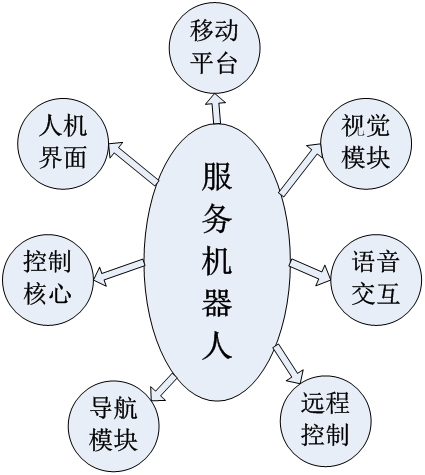
移动平台:移动平台作为整个移动机器人的底盘一般需要有足够的负载、提供足够的电池容量和优越的运动性能。
视觉模块:根据服务机器人的使用场景,视觉不仅可以进行常规的导航避障功能,还需要进行物体识别、人脸记忆等功能。
语音交互:随着语音识别与合成技术的发展,语音交互正被越来越多的应用到服务机器人中,如迎宾机器人、引路、餐厅宾馆服务机器人等,随着AI技术的发展,深度学习的不断完善,机器与人类的沟通正在成为可能。
远程控制:远程控制可以是机器人的使用者在任何时间地点能够控制,更好的为人类服务。
导航模块:机器人的地图构建与自主导航是目前服务机器人的必要功能,结合激光雷达、相机、声呐等一个或多个的组合,能够按照人们的意图从A点到达B点。
控制核心:控制核心作为整个机器人的大脑,接收各传感器反馈的信息做出分析,并指挥机器人的下一步动作。
人机界面:人机界面的功能类似于语音交互模块,目的为了实现与使用者的信息交互。
目前服务机器人研究中的关键技术:
环境感知:要实现机器人的环境感知,一种传感器目前已经很难满足目前的市场要求,多传感器融合技术成为目前研究的热点,多传感器融合技术就像人脑综合处理信息的过程一样,充分的利用多个传感器资源,在空间和时间上的互补与冗余的信息依据算法进行优化组合,产生对观测环境的一致性解释和描述。
定位与导航:在服务机器人中,自主导航是一项核心技术。服务机器人能够在自己工作的空间中找到一条从起始状态到目标状态、可以避开障碍物的路径。
智能控制:智能控制目的是为了让机器人变得更聪明,目前应用于智能控制的主要包括模糊控制、神经网路、进化计算等。
实验室的建设我们依照上图根据实际的需要增减不同的模块,每个模块可以根据不同的需求进行配置,如导航模块可以使用相机、雷达、声呐等,可以是其中的一中或多个的组合。
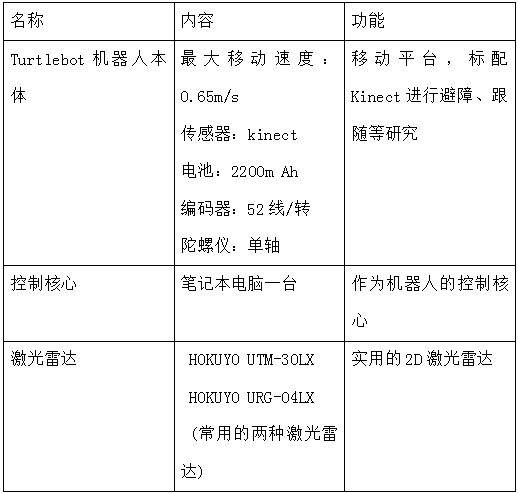
方案一:turtlebot基础研究平台
本套设备提供基于ROS的开源机器人操作系统,可以搭载Kinect传感器、激光雷达等进行机器人的基础研究,开展SLAM地图构建、自动导航、跟随、远程控制等。是一款入门级的研究套件。本套平台可包含如下图:

该套设备可开展研究:
- ROS学习
Turtlebot使用ROS系统,ROS作为一款开源的机器人操作系统,它能够提供类似传统操作系统的诸多功能,如硬件抽象、底层设备控制、进程间消息传递和程序包管理等。此外,它还提供相关工具和库,用于获取、编译、编辑代码以及在多个计算机之间运行程序完成分布式计算。
- SLAM技术
服务机器人或者一切移动机器人要高质量的完成任务,离不开准确可靠的定位导航技术。Turtlebot作为一款开源的机器人研究平台,能够提供相关的硬件驱动、函数库等,对于刚研究机器人的开发者是一款实用的入门平台。
- 已知地图下的自动导航技术
机器人的自主导航分为未知环境和已知环境,服务机器人的工作一般在已知的环境中,机器人通过SLAM保存好相应区域的地图,从A点到达B点,在运动过程中能够自动躲避动态的障碍物。在turtlebot中已提供相应的功能包可以使开发者很容易进行学习与研究。
- 相机、雷达等传感器的学习
Turtlebot作为一款开源的学习工具,提供大量的基于kinect、激光雷达的学习程序,可以使开发者很容易学习相机、雷达的使用。
- 算法验证
在ROS系统中提供了许多功能包文件,这些文件能够完成特定的功能任务,在进行算法研究和优化的过程中,可以通过更换包文件的中程序内容达到算法验证的目的。
该方案的目的:该方案提供的是一套机器人研究的基础开发套件,主要面向于刚接触机器人研究的开发者,该套设备提供硬件驱动、函数库、可视化编程、信息交互、软件包等。方便学生学习入门,可以很快的学习多种传感器的应用、SLAM技术等,为后续更高阶的开发打下坚实的基础。
方案二:多用途开发平台
该方案的目的是在Turtlebot基础上的升级,由于Turtlebto的定位为一款入门级的学习套件,在针对一些具体的应用场景如迎宾、餐厅服务、陪护机器人等,或者说是需要进行多传感器融合、搭载大负载的设备时无法使用的问题,而推出的一款具有更高负载、更快速度、传感器更为丰富、接口更为丰富的多用途移动开发平台。该套平台依然基于ROS系统,研究者可以在之前Turtlebto的基础上或是直接开发,都不失为一种可靠的平台。
该平台参数如下:
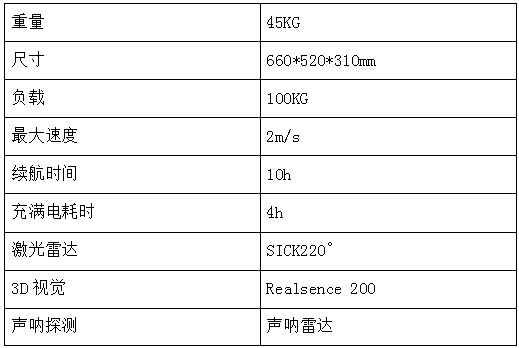
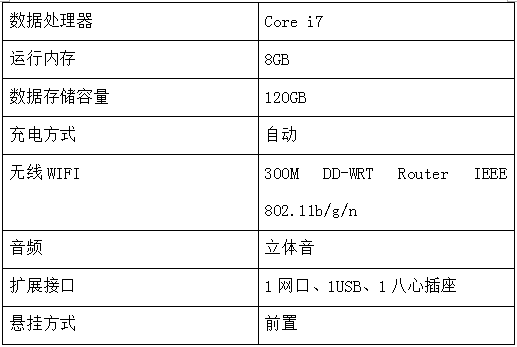

该款平台是我司自主研发的一款成熟的多功能研究凭条,通过与turtlebto的对比,我们不难发现该款平台具有更大的负载、更丰富的接口、更大的电池容量和更强的控制核心等优势,具有激光雷达、3D相机等多传感器的融合技术,能够快速自主建立地图并可根据情况快速的切换地图,可选择动态避障、静态等待或智能选择行进线路,基于最新一代的激光雷达SLAM技术,并可以搭载其他个性化的配置,是一款进行服务机器人研究的多用途平台。
后期可自行添加的模块如:语音交互模块、人机交互界面等,通过这些模块的添加能够快速的完成一个服务机器人的基础模型的搭建,省去了研发人员大量底层开发工作,可以重点的针对算法、应用场景进行优化。
实验室建设目的:提供用于服务机器人研究的开源移动平台,开发者根据实际的应用场景进行合理的添加模块并进行算法的优化,便可完成一台服务机器人的设计。该平台能够快速的是实现服务机器人的产业化。
该套设备可开展研究,除方案一种的功能外还具有:
- 多传感器融合技术
商业化的服务机器人利用某一单一的传感器显然是不可行的,目前常见的服务机器人一般都包含雷达、相机、语音模块等,多传感器融合势在必行,只有机器人能够对周围环境做出正确的判断,才能更好的为人类服务。多传感器融合技术就像人脑综合处理信息的过程一样,充分的利用多个传感器资源,在空间和时间上的互补与冗余的信息依据算法进行优化组合,产生对观测环境的一致性解释和描述。整套空地协同的多传感器融合有别于之前单一移动机器人上的多传感器融合技术,这里指的多传感器融合是基于两个或多个具有一定智能的自治机器人的基础,机器人之间通过通信实现信息交互,然后通过算法进行匹配、融合、冗余得到整个三维环境的正确描述。
- 预测控制算法研究
预测控制作为一种新型的控制算法,正在被大量的运用到机器人的研究当中,预测算法具有滚动优化策略,非全局一次优化,能及时弥补由于模型适配、干扰等因素引起的不确定性,鲁棒性好,并能推广到有约束、大延迟等实际过程,能有效处理多变量、有约束问题。
- 机器人产业化
我们提供的是一款开源的移动平台,留有丰富的接口并提供强大的负载能力和充足的电池能量,为服务机器人的产业化提供了基础的硬件环境,。基于新一代的激光雷达SLAM技术,能够快速的建立地图进行自主导航,可以为每个阶段的开发者提供合适的开发环境。