空地协同是目前机器人研究的一个热门方向,空地协同可以很好的弥补无人机、移动机器人各自工作时的缺点,移动机器人在地面工作主要存在视野较小,对周围的环境没有一个比较宏观的掌握,而这恰恰是无人机的优点,无人机可以通过携带的传感器大范围的进行环境的感知。而目前使用的多旋翼无人机大多存在工作时间较短,负载较轻等问题,通过与地面移动平台的配合,移动平台可以作为无人机的移动充电平台,实现对无人机的自动充电功能。
早在无人车的全球刚开始研发阶段,遇到在无人车前方无法检测到的区域如何解决时便有人提出使用无人机进行探测的方案,虽然该方案不太符合无人驾驶的发展需求,但也提供了一种新的思路。在沙漠、草地等地方进行无人测绘、探测时由于无人机的工作时间不能满足要求,提出通过地面移动凭条兼具太阳能发电的功能,无人机在电量不足的情况下自动降落在移动平台上进行自主充电。
空地协同的研究具有非常广阔的应用前景,空地协同不单单指一架无人机和一台无人车之间的协同,也可以是多移动平台和多无人机的协同,结合地面无人车辆的群控与无人机的群控,展开空间立体范围的空地多机器人群控研究。
空地协同实验室建设方案:
本实验室建设方案参照空地协同的研究体系进行配置,如下图:
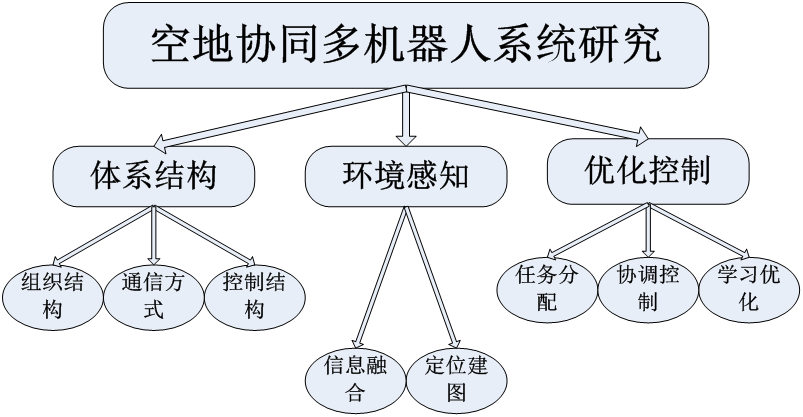
空地协同组成的多机器人系统,个体成员之间往往存在设计、结构、乃至智能上的差异,不同的配置方案可能会影响到不同的研究体系,系统的规模越大对多机器人之间的协同与通信要求更高。空地协同首先地面机器人与无人机之间的通信时必不可少的,合理的通信方式能够很好的解决多机器人之间的信息同步问题。在实现空地协同中,每个机器人的姿态信息和对整个环境的感知的情况也直接影响整个系统的运行,单个个体对于环境的感知的多信息融合然后是整个系统的多信息融合。
本方案的主要有地面UGV平台和无人机组成,涵盖了上述体系结构中用到的每个独立单元,根据不同的研究需求,UGV平台上可以搭载不同的传感器,该平台的主要组成如下:
移动平台选用我司自主研发的全地形移动平台,该平台采用强有力的四轮差速驱动系统,适合全地形的轮胎以及较高的底盘高度能够适应各种路面,并采用全新的防水式设计,能够适应户外的工作环境,车体内置高速处理器、编码器、IMU能够实现车体的底层控制,并附带有遥控装置,方便使用。

作为整套系统的地面部分,只有移动平台还无法完成空地协同的任务,地面的UGV平台需要与无人机进行数据交互,并能够自行的进行建图路径规划等任务,因此在移动平台上我们搭载了激光雷达、相机、rtkGPS和通信模块等。
激光雷达:主要用于地图创建和障碍物识别,激光雷达具有探测距离远、稳定性高不容易受环境影响的特点,能够很好的完成地图的创建和障碍物识别。
相机:相机的主要作用与激光雷达相似,但是由于激光雷达与相机的各自属性,相机目前容易受到外界光照的影响而雷达由于原理的影响只能识别物体轮廓,相机能够很好的检测对象的颜色等属性。相机与激光雷达的结合能够互相的弥补,在建图与避障中得到更好的应用。
rtkGPS: 分为基准站和移动站两部分, 基准站放在固定的位置,并实时以5Hz的原始数据向移动站发送差分改正信号;移动站接收载波相位差分信号的同时输出精确的定位信息及航向、姿态数据信息。采用双天线的惯性组合导航系统可以提供静态的初始化,并在有楼有树的城市主干道及过街天桥环境下能提供持续稳定的位置、航向、速度等信息。
通信模块:提供地面平台与无人机之间的通信链路,实现无人机与地面平台的数据能够快速的反馈的控制平台。
无人机我们采用大疆公司的M系列无人机,该系列无人机具有高负载和优秀的飞行性能,搭载了专业级的飞行控制系统,配备了IMU和GNSS模块,配合软件解析余度实现6路冗余导航系统,模块安装进行避震设计,数据更准确,能够实现精准的操控和稳定的飞行表现。并支持搭载云台和进行硬件的扩展,为后期开发提供了较大的空间。

整套设备的具体配置如下:
名称:UGV平台
内容:最大负载:≥75kg;
最大速度:1.0m/s;
最大爬坡角:45度;
供电约24V;
工作温度:-10℃~40℃;
驱动:4×4Zero-Maintenance;
名称:激光雷达
内容:16 通道、200米有效距离、30 万像素点、双回路、防护设计、+/-15 度纵向扫描全角、360度横向扫描全角、约100mm*65mm、约600g净重、功率小于10w;
名称:AHRS惯导单元
内容:静态漂移:0.25deg每小时;
动态漂移:1deg每小时;
功耗:<950mW;
工作温度范围:-40度~85 度;
输出频率最高:≥2KHz;
名称:双目相机
内容:最高分辨率:4416*1242 15Hz;
深度参数:0.7~20 米;
系统支持:win78 10linux;
尺寸:175*30*33mm;
算法:6dof 位置跟踪算法、Mwesh算法;
名称:rtkGPS
内容:
基站指标:
GPS:L1C/A、L2C、L2E、L5; GLONASS:L1C/A、L1P、L2C/A;
L2P BDS:B1、B2、B3; SBAS:L1C/A,L5;
Galileo:L1 BOC,E5A,E5B,E5AltBOC; QZSS:L1C/A,L1SAIF,L2C,L5;
220通道数; 初始化时间:<10s; 初始化可靠性:典型>99.9%;
输出最大数率:20HZ;冷启动时间:<45s; 温启动时间:<30s;
热启动时间:<10s
静态精度:
平面精度:±(2.5+1×10-6×D)mm 注1; 高程精度:±(5+1×10-6×D)mm;
RTK精度:
平面精度:±(10+1×106×D)mm; 高程精度:±(20+1×10-6×D)mm;
SBAS 定位精度:0.3-0.6m; 单机定位精度:1.5m;
测速精度:0.03m/s(RMS); 功耗:<7.0W;
供电电压:DC 9~36V, 带正负极性反接保护;工作温度:-30℃~+70℃存;
防护等级:IP65; 湿度:95%无冷凝;
撞击和振动:抗2m 跌落,满足车辆振动要求; 指示:6 个LED指示灯;
数据接口:
数据输出:NMEA-0183、原始数据; 数据刷新率:1-50Hz可选;
差分格式:RTCM2.3/3.0/3.1/3.2、CMR、RTCA;通讯:无线电通讯模块、以太网;
接口方式:RS232 和RJ45; 电源:1 个;
波特率:9600-921600; 串口:2 个,差分和控制端口;
数据链天线:1 个; GNSS 天线接口:2 个;
移动站指标:整体指标如基站所述,附加指标如下:可同时测两个天线位置。
航向精度:
天线间距 0.5 米:<0.17 度; 天线间距 1.0 米:<0.10 度;
天线间距 2.0 米:<0.05 度; 俯仰/横滚精度:<1度;
名称:增稳云台
内容:
微调范围:最大可控转速;旋转方向:200°/s;
俯仰方向:100°/s;横滚方向:30°/s;
机械限位范围:旋转方向:360°;
俯仰方向:+270°/-150°;横滚方向:±110°;
可控转动范围:
旋转方向:360°;俯仰方向:+45°/-135°;
横滚方向:±25°;最大负荷:4.5kg;
内置功能:多种工作模式:便携悬挂,上下倒置,手提模式,机载悬挂,摇臂,飞猫等设备悬挂;
内置独立IMU 模块;
蓝牙模块、USB接口、2.4GHz 接收机、温度传感器、D-Bus支持;
工作电流:
静态电流:300mA(@16V);动态电流:600mA(@16V);
堵转电流:最大10A(@16V);工作环境温度:-15~50℃;
可搭载相机尺寸:相机重心到横滚轴的最大水平长度为120mm;
相机宽度不超过160mm;高度不超过130mm;
角度抖动量:±0.02°;
名称:无人机
内容:
7 公里控制距离;
38分钟最长飞行时间;
IP43级别防护;
2 公斤最大负载;
双电池系统;
FPV相机;
FlightAutonomy;
多负载;
内置RTK;
软件功能:智能跟随、兴趣点环绕、30m 范围自动避障、二次编程接口;
名称:双目全景相机
内容:
像素:3.6MP;
帧数:60FPS;
水平FOV: 360 度;
垂直FOV :58度;
基线:大于等于12cm;
接口:USB3.0;
灰度输出、硬件同步信号输出、5V输入、最大电流800MA、系统支持:win7 8 10 linux 长距离数传模块;
该套实验设备可开展科学研究:
- 空地协同定位与地图构建
多机器人协同定位与环境地图构建(CSLAM),定位与地图构建是实现机器人自主导航的关键,集中体现了移动机器人的感知能力和控制水平。与单个移动机器人定位相比,在复杂的动态环境下,多机器人通过相互协作可以共享、融合并有效利用传感器信息,提高对周围环境感知的全面性和准确性,从而提高了机器人群体的定位与地图构建精度。目前在这方面的研究主要用到卡尔曼滤波算法、扩展卡尔曼滤波算法、蚁群算法等。地面机器人与无人机协作建图过程中,可以采取独立探索、集中建图的方式,单个独立机器人在彼此的测量范围观测时,利用机器人之间的相对观测量计算,然后通过匹配算法来确定局部地图之间是否有重叠,若路标相匹配,则利用该路标信息提高定位与建图的精度。
- 多传感器信息融合研究
多传感器融合技术就像人脑综合处理信息的过程一样,充分的利用多个传感器资源,在空间和时间上的互补与冗余的信息依据算法进行优化组合,产生对观测环境的一致性解释和描述。整套空地协同的多传感器融合有别于之前单一移动机器人上的多传感器融合技术,这里指的多传感器融合是基于两个或多个具有一定智能的自治机器人的基础,机器人之间通过通信实现信息交互,然后通过算法进行匹配、融合、冗余得到整个三维环境的正确描述。
- 空地编队研究
空地机器人编队的研究通常意义上可分为两部分,即机器人的编队的形成控制和机器人队形的保持控制。机器人的编队队形控制指地面机器人与无人机从初始状态运动到指定的几何形态的过程。队形的保持控制指空地机器人组成的队形在向特定目标或指定方向运动的过程中,保持特定的几何形态,同时又要适应环境约束而进行的控制。空地编队需要合理的分配资源(空间和时间),避免机器人之间的资源冲突。空地机器人编队是空地机器人协作的一个全面有效的展示方法。
- 空地协同机器人的动态追捕)
多机器人追捕是研究如何指导一群自主型的机器人相互合作去扑捉一运动的物体(也可以是机器人),多机器人的动态追捕是一个比较新的课题,涉及到多机器人的很多层面,各个层面之间联系起来构成一个完整的系统,是对空地协同的多机器人系统的感知能力、学习能力和动态决策能力的全面的检验。整套系统包括下面几个方面:
- 地面机器人与无人机对环境的探索
- 机器人之间的信息共享
- 机器人的学习
- 根据所知环境信息决策各个机器人的动作策略
- 机器人动作冲突消解
该方案的建设目的:
本系统是由多个机器人组成的群体系统通过协调、合作来完成原本由单个机器人无法或难以完成的工作。群体移动机器人系统具有丰富广泛的环境感知能力,并行执行的高校工作效率。空地协同是对于多机器人协调合作所展开的一个典型应用。空地协同机器人系统具有以下其他机器人系统或单一机器人无法替代的优点:
- 适合完成复杂任务:对于复杂的任务及大范围的环境,利用空地机器人系统可把复杂的任务分解成多个简单的子任务,利用多个单机器人进行协调工作,可以有效的完成任务。
- 时空分布性:空地机器人系统可分布在不同的区域内同时作业,可提高完成任务的效率。
- 功能分布性:在空地机器人系统中,地面机器人与无人机的功能各有优势,他们的目标任务可以不同,但他们可协调工作最终完成任务。
- 感知分布性:在一个区域较大的环境中,多个单个自主机器人分布在环境中,各自感知周围的环境,通过机器人之间的学习共享感知到信息,大大扩展了机器人系统对环境的感知范围。
- 较高的系统可靠性:空地协同的机器人系统可以降低单个机器人设计的复杂度,从而提高了单个机器人的可靠性,机器人数量上的冗余,可以提高整个系统的可靠性。